Hexapod robots can be divided into two categories. Rectangular hexapods have a rectangular body and two groups of three legs placed symmetrically along the two sides. Hexagonal hexapods have a hexagonal or circular body, with legs distributed evenly (Ding et al, 2010). Rectangular hexapods are considered less stable and efficient that hexagonal types, and it is thought that hexagonal hexapods came about initially from an extension of the length of the middle leg of a rectangular hexapod (Ding et al, 2010).
The legs of these robots are designed to mimic walking insect legs, with three 'degrees of freedom', which means that there are three points where the leg can move, or three joints (Figure 3) (Ding et al, 2010). Hexapods have many walking mechanisms which are classified according to the number of legs supporting the body.
3+3 Tripod Gait
This walking mechanism involves the robot having three legs standing on the ground supporting the body while the other three swing forward (Mushrush & Spirito, 1978). If the legs of the hexapod are labelled in an anticlockwise manner, (as in figure 4) legs 1, 3 and 5 start in 'stance phase', and support and body and push it forward as legs 2, 4 and 6 swing forward (in 'swing phase). Then, legs 2, 4 and 6 are in 'stance phase' while legs 1, 3 and 5 swing ahead. This gait therefore includes 2 steps, with the robot moving twice.
4+2 Quadruped Gait
Imagine that the legs of the robot are labelled so that the legs along the left side are labelled 1, 2 and 3, and those along the right side are 4, 5 and 6 (see figure 5). Legs 1 and 4 are raised and swing forward, while legs 2, 3, 5 and 6 support and push the body forwards (Ding et al, 2010). Legs 2 and 5 then swing forward, while the rest support and push the body forward. Legs 3 and 6 then swing forward, while the rest support and push forwards. This whole procedure is then repeated (Ding, et al). This gait is not often seen in insects.
5+1 One by One Gait
In this gait, legs simply move forward one after the other in a clockwise or anticlockwise fashion while the other 5 legs are in 'stance phase' (Ding et al, 2010). This gait was modelled from the metachronal insect gait.
The legs of these robots are designed to mimic walking insect legs, with three 'degrees of freedom', which means that there are three points where the leg can move, or three joints (Figure 3) (Ding et al, 2010). Hexapods have many walking mechanisms which are classified according to the number of legs supporting the body.
3+3 Tripod Gait
This walking mechanism involves the robot having three legs standing on the ground supporting the body while the other three swing forward (Mushrush & Spirito, 1978). If the legs of the hexapod are labelled in an anticlockwise manner, (as in figure 4) legs 1, 3 and 5 start in 'stance phase', and support and body and push it forward as legs 2, 4 and 6 swing forward (in 'swing phase). Then, legs 2, 4 and 6 are in 'stance phase' while legs 1, 3 and 5 swing ahead. This gait therefore includes 2 steps, with the robot moving twice.
4+2 Quadruped Gait
Imagine that the legs of the robot are labelled so that the legs along the left side are labelled 1, 2 and 3, and those along the right side are 4, 5 and 6 (see figure 5). Legs 1 and 4 are raised and swing forward, while legs 2, 3, 5 and 6 support and push the body forwards (Ding et al, 2010). Legs 2 and 5 then swing forward, while the rest support and push the body forward. Legs 3 and 6 then swing forward, while the rest support and push forwards. This whole procedure is then repeated (Ding, et al). This gait is not often seen in insects.
5+1 One by One Gait
In this gait, legs simply move forward one after the other in a clockwise or anticlockwise fashion while the other 5 legs are in 'stance phase' (Ding et al, 2010). This gait was modelled from the metachronal insect gait.
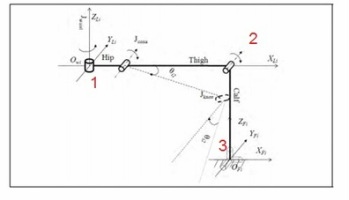
Figure 3: The general structure of a 3 degrees of freedom leg.
Source: Modified from an image by Ding, et al, 2010
Source: Modified from an image by Ding, et al, 2010
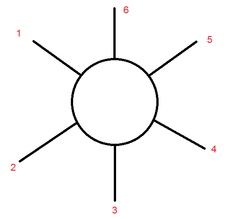
Figure 4: Diagram illustrating the leg arrangement around a hexagonal hexapod.
Source: Jones, 2011
Source: Jones, 2011
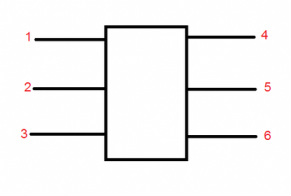
Figure 5: Diagram illustrating the leg arrangement around a rectangular hexapod.
Source: Jones, 2011
Source: Jones, 2011
Free Gait
This gait has no fixed or periodic gait; rather its walking mechanism is determined by the terrain and the machine's state (Ding, et al). This mechanism is very complicated but gives the robot a more flexible gait to better cross complicated terrain. This gait type is not seen in insects.
Because a number of walking mechanisms are available, if the hexapod should damage or lose a leg (or a number of legs), the gait can be adapted to enable the robot to continue on. This point will be covered more in the advantages of hexapod gait.
This gait has no fixed or periodic gait; rather its walking mechanism is determined by the terrain and the machine's state (Ding, et al). This mechanism is very complicated but gives the robot a more flexible gait to better cross complicated terrain. This gait type is not seen in insects.
Because a number of walking mechanisms are available, if the hexapod should damage or lose a leg (or a number of legs), the gait can be adapted to enable the robot to continue on. This point will be covered more in the advantages of hexapod gait.
